register.cpp Notes and Instructions
Executable takes the log file as a command line argument. Assumes that PCL- Change the header in the pcd files from "rgb" to "rgba" (or modify rcv2pcd and reconvert your rcv point cloud files to pcd files with that header).
- Change the "PointXYZ" data type in register.cpp to "PointXYZRGBA"
- register.cpp
- CMakeLists.txt
- FindPCL.cmake
- Within that directory: mkdir build cd build cmake .. make register
- You need to convert the rcv point clouds to pcd. I downloaded all the rcv point clouds into a folder called "pointclouds_rcv". Using the bash script, I just tack on a ".pcd" to the txt filenames for simplicity, and the version of rcv2pcd I posted takes input and output filenames (I think I didn't change anything). Here's the bash script I used:
for i in pointclouds_rcv/* do
./rcv2pcd $i $i.pcd
done - Then move the log file and the executable into the folder with the pcd files. I had some issues with the 14th set of scans, so I just deleted them from the log file.
- Finally, it outputs to hallway.pcd. You can view this by: pcd_viewer hallway.pcd.
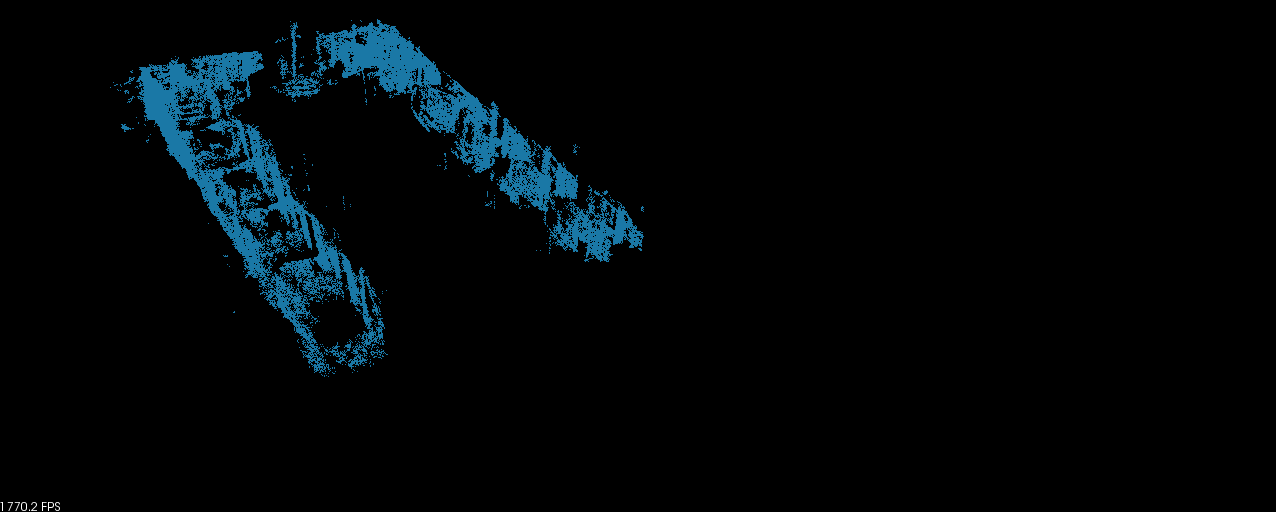
Image 1 (register.cpp v1): No pre-processing; only odometry estimates--ca. 1.8 million points

Image 2 (register.cpp v2): statistical removal and downsampling of each individual point cloud--ca. 1.4 million points
 hallway2_screenshots.tar.bz2
* Set ALLOWTOPICVIEW = FRCVRoboticsGroup
hallway2_screenshots.tar.bz2
* Set ALLOWTOPICVIEW = FRCVRoboticsGroup* Set ALLOWTOPICCHANGE = FRCVRoboticsGroup -- StephenFox - 2011-06-15


| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
hallway2.png | r1 | manage | 20.0 K | 2011-06-15 - 20:15 | UnknownUser | |
| |
hallway2_screenshots.tar.bz2 | r1 | manage | 6714.9 K | 2011-06-22 - 15:39 | UnknownUser | screen shots of tilt hallway data june22 |
| |
register.tar.bz2 | r1 | manage | 3.8 K | 2011-06-15 - 16:02 | UnknownUser | |
| |
register_v2.tar.bz2 | r1 | manage | 4.0 K | 2011-06-15 - 20:24 | UnknownUser | |
| |
screenshot-1308151462.png | r1 | manage | 63.1 K | 2011-06-15 - 16:04 | UnknownUser |
Topic revision: r2 - 2017-06-12 - DamianLyons

{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback