Multi-robot Fast Model Construction Using Potential Field

Objective
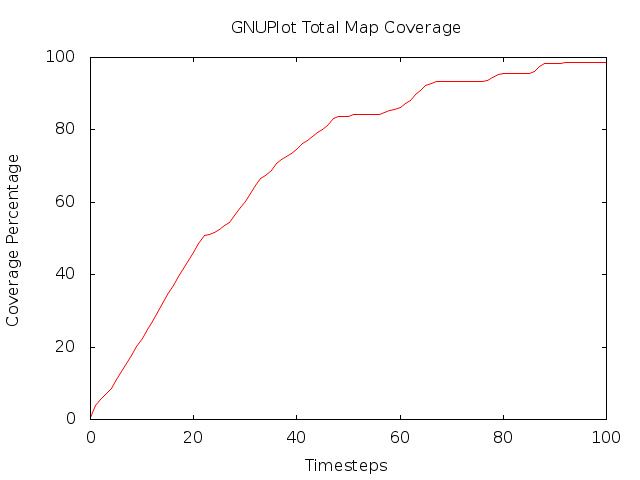
Using a team of robots to get a map of indoor area within- Minimum time
- Most coverage
- Least overlapping
Schedule
- [Jun 01 - Jun 08] Literature review
- Look at ICRA 2012 & 2011
- keywords: coverage, potential field, navigation, multi-robot exploration, local navigation, local path planning
- List of papers, short annotation on each one
- be very specific about what's different and what's the same
- [Jun 01 - Jul 08] Refine algorithm
- Test on obstacle map
- chart: amount of duplication -> average potential over time map
- redo random noise
- global scope oversee the whole map
- Two output map: slam result map and potential map
- Result map
- Potential map
- [Jun 08 - Jul 01] MobileSim Integration
- [Jul 01 - Jul 15] MobileSim test runs
- [Jul 15 - Aug 01] Real robot integration complete
- [Aug 01 - Aug 15] Real robot test runs
- [Aug 15 - Sep 01] Paper writeup
Literature Review
Algorithms
testResults
testConclusion
test <meta name="robots" content="noindex" /> -- (c) Fordham University Robotics and Computer Vision

| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
TotalCoverageLevel.png | r1 | manage | 15.2 K | 2013-05-31 - 19:54 | UnknownUser | |
| |
VectorField.gif | r1 | manage | 3118.9 K | 2013-05-31 - 19:53 | UnknownUser |
Topic revision: r1 - 2013-05-31 - TsungMingLiu

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback