Rotational Legged Locomotion

 The Rotopod is a novel robot mechanism which combines the features of wheeled and legged locomotion in an unusual way.
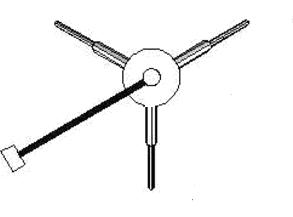
This robot has the advantage of legged locomotion in stepping its 1-DOF legs over objects, but its drive mechanism is a rotating reaction mass that rotates the robot, in a controllable fashion, around each of its legs, similar to a rotating wheel. The mechanism has the potential to transfer the energy from the rotating reaction mass in an efficient manner to the legs, effecting a spinning forward motion.
When all legs are fully extended and the center arm rotating, the robot is stationary. When the length of one or more of the legs is reduced an approporiate amount, the robot may then rotate around one of its legs in contact with the ground. This 'stepping' will continue as long as the legs are maintained at these lengths.
Rotopod paper:
CLAWAR2007: 10th International Conference on Climbing and Walking Robots 16-18 July, 2007 Singapore. Lyons07_A4.pdf.
The Rotopod is a novel robot mechanism which combines the features of wheeled and legged locomotion in an unusual way.
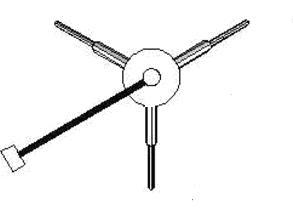
This robot has the advantage of legged locomotion in stepping its 1-DOF legs over objects, but its drive mechanism is a rotating reaction mass that rotates the robot, in a controllable fashion, around each of its legs, similar to a rotating wheel. The mechanism has the potential to transfer the energy from the rotating reaction mass in an efficient manner to the legs, effecting a spinning forward motion.
When all legs are fully extended and the center arm rotating, the robot is stationary. When the length of one or more of the legs is reduced an approporiate amount, the robot may then rotate around one of its legs in contact with the ground. This 'stepping' will continue as long as the legs are maintained at these lengths.
Rotopod paper:
CLAWAR2007: 10th International Conference on Climbing and Walking Robots 16-18 July, 2007 Singapore. Lyons07_A4.pdf.
Videos
- Set ALLOWTOPICCHANGE = FRCVRoboticsGroup


| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
Lyons07_A4.pdf | r1 | manage | 576.0 K | 2011-09-09 - 17:39 | DamianLyons | |
| |
epicycloid_slow.avi | r1 | manage | 2079.5 K | 2011-09-09 - 17:43 | DamianLyons | |
| |
hitorque.avi | r1 | manage | 2752.0 K | 2011-09-09 - 17:29 | DamianLyons | |
| |
planview.jpg | r2 r1 | manage | 5.8 K | 2011-09-09 - 17:36 | DamianLyons | |
| |
planview2.jpg | r1 | manage | 5.8 K | 2011-09-09 - 17:36 | DamianLyons | |
| |
sideview.jpg | r1 | manage | 7.5 K | 2011-09-09 - 17:37 | DamianLyons | |
| |
uvs060411-005a.jpg | r1 | manage | 70.1 K | 2011-09-09 - 17:33 | DamianLyons |
Topic revision: r1 - 2012-05-18 - DamianLyons

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback