GPS & Wifi Mods to R118
Robot 118 is a P3-AT equipped with Gyro, TCM2, DPPU PT unit, and Bumblebee stereohead. Robot 118 was modified to carry a GPS on a tripod mounted to the top-plate. This gave the GPS sufficient hight to get a very reliable signal. The GPS was connected to ttyS3 (com port 4). Note that Com port 4 needs to be initialized to use IRQ 5 before it can be used. The extra payload mounting opportunities offered by the tripod were exploited to move the WiFi AP from the top-plate onto the tripod body, for a less crowded top-plate and probably better WiFi range. These modifications to Robot 118 were tested using an modified stereoServer/clientDemo that stores GPS and TCM2 data in addition to the odometry and stereodataset file information.Tripod
The Tripod is an aluminum light stand with telescoping center column and legs. The leg ring is pushed down as far as possible to create a space under the tripod and elevate the center column. The legs are mounted as follows: one centered on the back rim of the top-plate and one on each side of the top-plate. This leaves the front clear for the DPPU to rotate the stereocamera unobstructed. Holes were drilled into the top-plate and angle brackets used to anchor the tripod legs. Only the mid-back hole required that the top-plate be opened. The electronics were covered during this last operation to prevent any drillings from fouling up the works. A ferrule mounted to a horizontal plate was used to secure the GPS to the top of the center column. The horizontal plate was secured to 2 of the 4 moutning holes under the GPS. The height of the GPS was about 5 foot and was selected somewhat arbitrarily. The Wifi AP was secured to the center column about half way up using cable ties.- Base of the Tripod achored to top-plate

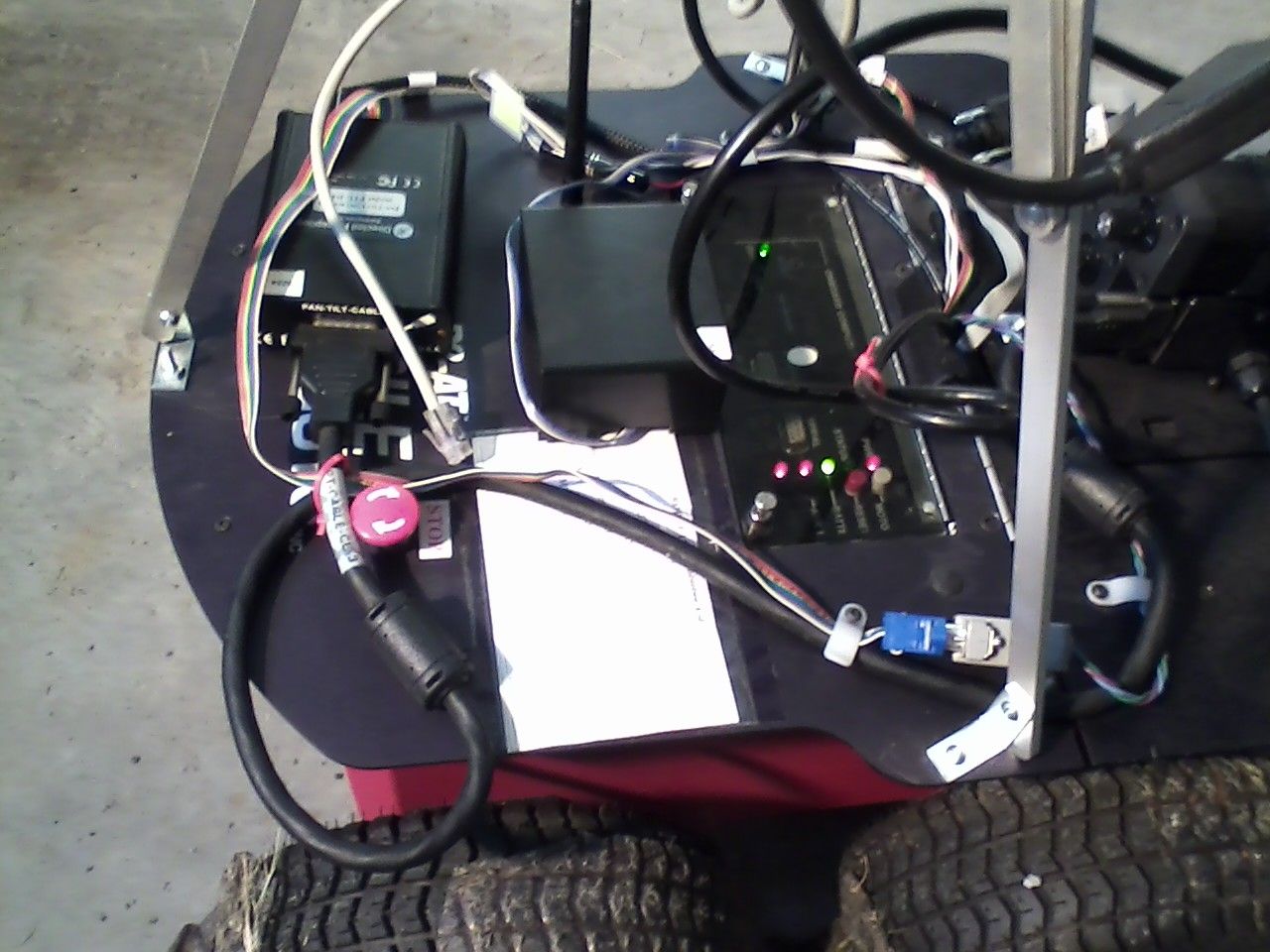
- Complete system and closeup of Tripod


Software
The GPS was tested using the serialGPS object. The source files for this homegrown GPS interface are serialGPS.cpp/.h. See the software section for more details on this. -- DamianLyons - 2011-07-11

| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
R118-mod1.jpg | r2 r1 | manage | 68.7 K | 2011-07-11 - 18:44 | DamianLyons | |
| |
R118-mod2.jpg | r2 r1 | manage | 151.9 K | 2011-07-11 - 18:44 | DamianLyons | |
| |
R118-mod3.jpg | r2 r1 | manage | 151.5 K | 2011-07-11 - 18:43 | DamianLyons | |
| |
R118-mod4.jpg | r2 r1 | manage | 52.6 K | 2011-07-11 - 18:45 | DamianLyons |
Topic revision: r1 - 2011-07-11 - DamianLyons

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback