<span style="color: #7a4707; font-family: 'Courier New', courier, monaco, monospace; white-space: pre;"><meta name="robots" content="noindex" /></span>
* GRID13_cleanDump.tar.gz: Clean Data Dump folder for HSVD project. 11/7/16
* GRID12_cleanDump.tar.gz: Clean Data Dump folder for HSVD project. 11/7/16
* GRID11_cleanDump.tar.gz: Clean Data Dump folder for HSVD project. 11/7/16
* GRID14_cleanDump.tar.gz: Clean Data Dump folder for HSVD project. 11/7/16
* GRID14_grids.tar.gz: Grid folder for HSVD project post smoothing. 12/5/16
* GRID12_grids.tar.gz: Grid folder for HSVD project post smoothing. 12/5/16
* GRID11_grids.tar.gz: Grid folder for HSVD project. 2/23/17
This data is provided for general use without any warranty or support. Please send any email questions to dlyons@fordham.edu, bbarriage@fordham.edu, and ldelsignore@fordham.edu.
<br /> * Set ALLOWTOPICCHANGE = FRCVRoboticsGroup -- (c) Fordham University Robotics and Computer Vision
Visual Homing with Sterevision Databases (HSVD)
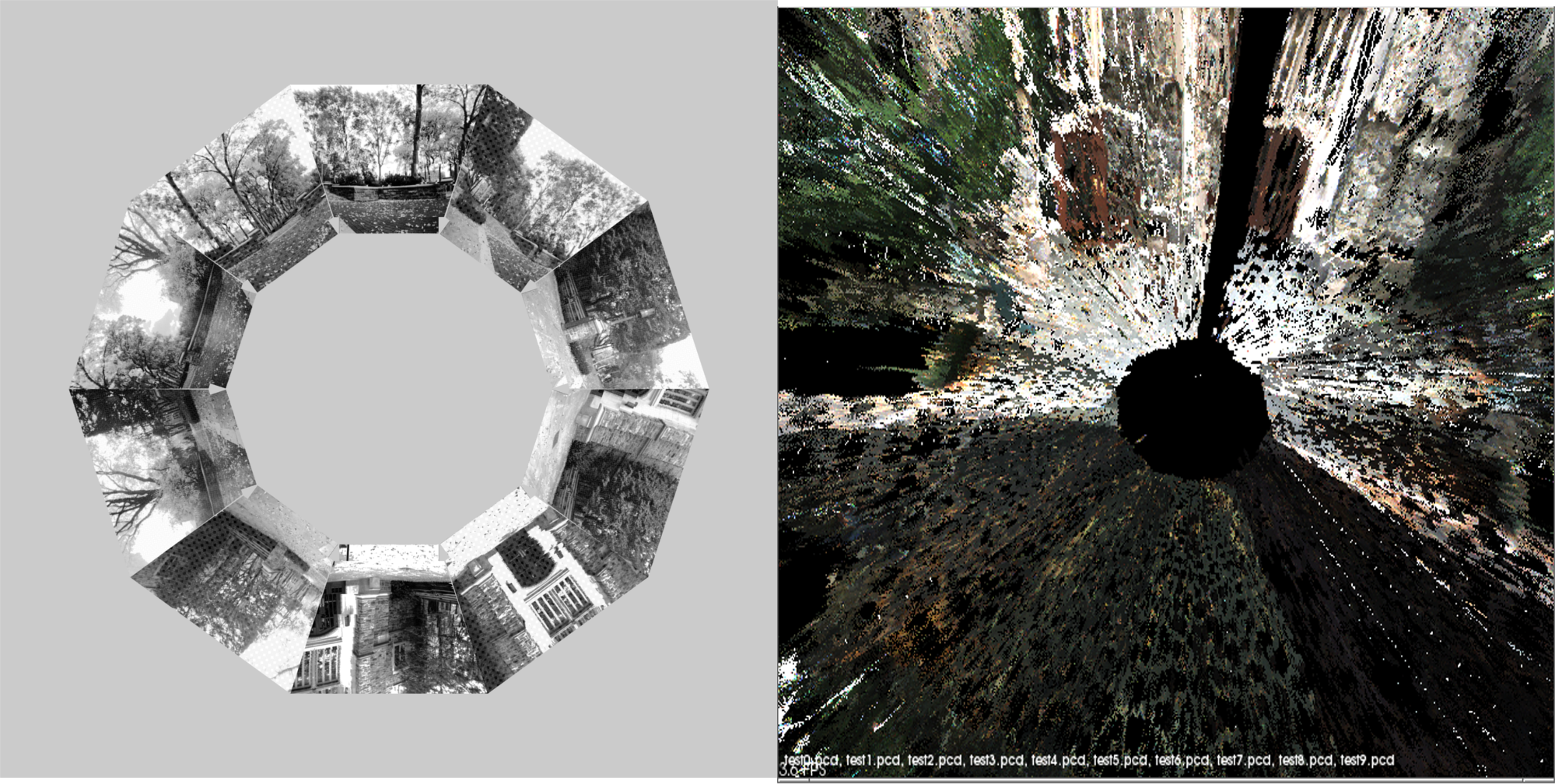
The HSVD project is an extension of the work previously done with HSV, a method of navigation devleoped for a robotic platform based upon common navigation techniques of insects. This extension results in an HSV program that is compatible with a user's database in order for simulated navigation of a grid between a starting location and a goal location, using their respective images.This is perfomed by comparing key features found belonging to both a concatenated set of home images and a concatenated set of current location images. Through this we hope to create a working simulation of accurate and efficient traversal of a database, consisting of location coordinates and orientations, using some of the key concepts implemented earlier in the HSV project.Integrating Stereovision Database into the HSV program
Execution begins as the program recieves coordinates for both the current and goal locations, along with the orientation of the robot in each of these instances. Just prior to this, the user will be tasked with entering the grid number of the database which they would like to use. When entering the coordinates, make sure the second value is negative; this is due to the nature of the robot's axis. COORDINATE FRAME CONVENTIONS: A zero pose of the robot has it at the origin facing +X direction. Thus a +ve angle is CCW and turns towards +ve Y and a -ve angle is CW and turns towards -ve Y. The orientation and location will then be used to determine the proper images to use with the database grid, along with a selection of these images to represent the forward facing one hundred eighty degrees of the robot. These images are then concatenated into two panoramic images, one representing the goal location and one representing the current location, which are examined using sift features to find keypoints which can be compared between the images of the two locations. Once these keypoints are compared and a subset are determined to be valid, motion can be determined by comparing the theta and distance values for each of the matches points. Both of these calculations are performed within vh.cpp and the averages are used to determine the motion of the robot. It is important to note that the distance should be calculated using the Euclidian formula for distance and that a negative value should be reachable. The robot will move a portion of the way so that compensation can be performed in the instance of an incorrect turn or move, which will occasionally occur during execution. Attention should be paid to the scale and gain values within main.cpp which will have a significant affect on the program; generally, the scale should be 1000 and the gain values should be between 0.3-0.6, but no higher than 1.0. In addition, ample time and steps must be provided because the robot may still reach its location despite taking a great deal of time to do so.Repository Information
1. Files below labelled GRIDXX_grids contain visual image folders, while those labelled GRIDXX_cleanDump contain stereo depth data. 2. Histogram smoothing was performed on the visual images of GRID14, an outdoor grid, in order to compensate for lighting conditions. 3. A statistical filtering program, from the point cloud library, was executed on stereo-depth to clean up some stereo noise data. The parameters of the point cloud statistical filter were a meanK of 50 and a standard deviation threshold of 0.2.Project Figures & Diagrams
- Depth Figures for HSVD Conference Paper: GRID 14
- Image Figures for HSVD Conference Paper: GRID 14
Datasets
* GRID13_grids.tar.gz: Grid folder for HSVD project. 10/27/16* GRID13_cleanDump.tar.gz: Clean Data Dump folder for HSVD project. 11/7/16
* GRID12_cleanDump.tar.gz: Clean Data Dump folder for HSVD project. 11/7/16
* GRID11_cleanDump.tar.gz: Clean Data Dump folder for HSVD project. 11/7/16
* GRID14_cleanDump.tar.gz: Clean Data Dump folder for HSVD project. 11/7/16
* GRID14_grids.tar.gz: Grid folder for HSVD project post smoothing. 12/5/16
* GRID12_grids.tar.gz: Grid folder for HSVD project post smoothing. 12/5/16
* GRID11_grids.tar.gz: Grid folder for HSVD project. 2/23/17
This data is provided for general use without any warranty or support. Please send any email questions to dlyons@fordham.edu, bbarriage@fordham.edu, and ldelsignore@fordham.edu.
Permissions
* Persons/group who can change the page:<br /> * Set ALLOWTOPICCHANGE = FRCVRoboticsGroup -- (c) Fordham University Robotics and Computer Vision
Topic revision: r1 - 2017-04-25 - BenBarriage

Ideas, requests, problems regarding TWiki? Send feedback