The front right bumper was plugged into digital 2.
Front left light sensor was plugged into analog 1.
Front right light sensor was plugged into analog 2.
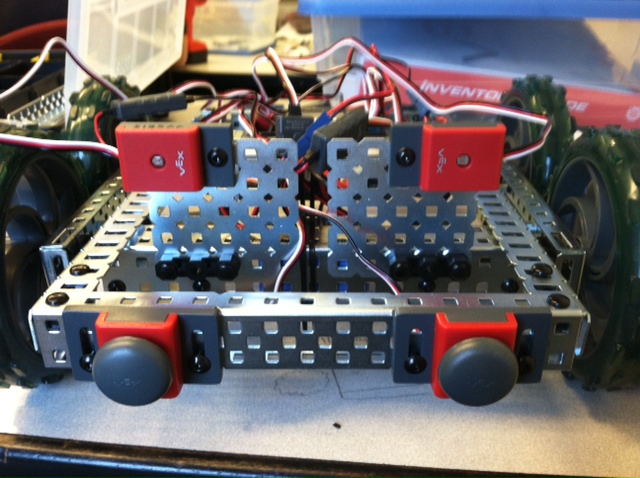
The design of the light sensor apparatus was based on the idea of keeping them as far apart as possible, while still keeping them within the boundaries of the main frame. we chose to mount the light sensors above the frame and have them sticking out to the right or left of it to achieve the best effect from a light source.

The following is an example of our light sensor working. Note how when a light sensor is given a light source, the contralateral wheels spin, meaning that the sensor not receiving light will turn towards where the source is.
The following video displays the bumper sensor test, with action on the bumpers causing a corresponding response by the motors.
<meta name="robots" content="noindex" />
-- (c) Fordham University Robotics and Computer Vision


| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
bumper_sensor_test.MOV | r1 | manage | 1150.0 K | 2013-04-14 - 21:25 | UnknownUser | |
| |
light_sensor_test.MOV | r1 | manage | 1529.2 K | 2013-04-14 - 21:25 | UnknownUser | |
| |
light_sensors.JPG | r1 | manage | 140.1 K | 2013-04-14 - 21:25 | UnknownUser |

{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback